无人驾驶,可能很长时间都跟人工智能没什么关系

欢迎关注“创事记”的微信订阅号:sinachuangshiji
文/王冠雄
互联网人喜欢说风口,更喜欢把风口放到一起,好像这样能造成1加1大于2的效果。
而且有些被寄予厚望的技术可能确实有内在联系,于是就更可能被看做有相互刺激的合力产业来对待,期待协同爆发能产生天翻地覆的效果。
比如人工智能和无人驾驶。
确实,人类利用人工智能技术来处理比如机械操作、驾驶、勘测等工作是毫无疑问的必然。
但是必然不等于马上实现,我们现在所处的只是众多技术在研发和商业化的开端而已。从0进化到10,1和9都是不能迈过的。目前的人工智能和无人驾驶,可能就处在这样一个关系里。
【无人驾驶的第一级形态,必然是低速和固定场景应用】
首先要知道,到底什么是无人驾驶。
无人驾驶的核心判断点,在于从自动驾驶的人力合力和传统汽车操作方式中解脱出来,变成车辆根据设置目标主动完成驾驶的全过程。
而从技术成熟和应用可能性的过程上来说,无人驾驶绝不可能是一蹴而就,直接在城市交通的复杂路况上行驶的。
由于对安全的担忧和对数据积累的需要,初期无人驾驶,必然有两点制约:
首先是速度。无人驾驶开始投放应用时,必然无法很快就像跟正常机动车一样的高速行驶。而是要从时速五十公里以下的低速车开始应用,逐步检测和完善无人驾驶系统的可靠程度。
其次是应用场景。初始阶段的无人驾驶,基本不可能马上在复杂路况中投放使用。我们更可能看到的可能是校园、景区、企业园区、机场,这样的场景中使用无人驾驶车辆。一方面是这些场景中路况简单,无人驾驶要处理的问题很少,而且可以整体更换无人驾驶车辆,保证车辆间交互的可行性。另一方面这些场景对运力的要求低,使用时间少,从而满足初级阶段无人驾驶低速度、强监控的特点。
所以说,无人驾驶初期要淘汰的一定是低速电动摆渡车,而这一阶段,人工智能的的参与感并没有那么强烈。
【相比深度学习,更重要的是避险保障、精准行驶和人机交互】
人工智能管理无人驾驶车辆,逻辑是通过深度学习和应对机制分析体系,来解决车辆行驶中的各种问题,保障行驶安全。
但是车辆在真实交通场景中遇到的问题是千变万化的,每一个问题都可能是新问题,很多甚至执法者难以分析责权,更别提基于对以往案例学习的人工智能体系了。尤其是在交通方案选择上,在复杂路况和拥堵路况上,目前的人工智能算法很难完全代替经验和人工的判断能力。
而低速的无人驾驶,人工智能的应用点也不够多。这种场景中,主要确保行驶安全和运营流畅的技术是三种:避险保障技术,精准行驶技术和新型的人机交互。

避险保障是保证无人驾驶车辆安全的先觉因素,目前看来最佳的解决方案是通过硬件判断车辆与他物的距离和可能碰撞速度,从而指挥驾驶体系完成躲避。因此感知硬件类是核心。
精准行驶是保证车辆可以完成交通目的的技术和硬件体系,主要的是基于地图和GPS、车辆感知的路线判定。此外智能变速,地形模块也很重要。
经常被人忽视的,是无人驾驶模式下的人车交互。自动驾驶技术下,人车交互方式并没有多大改变。但无人驾驶模式下,人的指令方式要从全程操作变为应急指挥和命令下达,需要全套的操作体系来适应这一需求。
反观这些无人驾驶的需求,会发现人工智能目前还很难区别其中任何一项,因此初级阶段的人工智能更可能作为辅助技术加入无人驾驶技术群里,而非真正成为中枢指挥者。
当然未来人工智能一定会成为人类完成交通的方式,但那需要人工智能本身的大幅度进化以及人工驾驶底层技术和硬件的完善,距离二者不期而遇,目前来看还有一些距离。

【初级无人驾驶,这些技术最重要】
那么不妨来看看,初级无人驾驶哪些技术最重要,最有可能改变无人驾驶进入市场的速度。
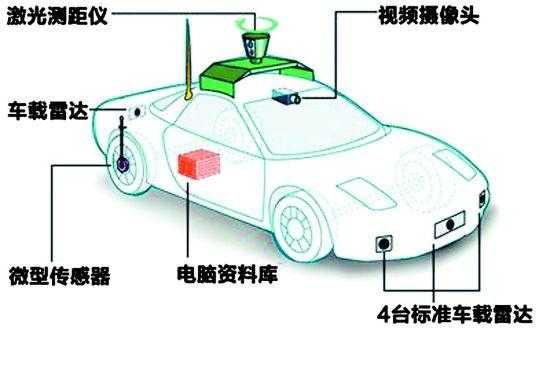
一、激光雷达。雷达感知在外环境,好像是目前最成熟的无人驾驶保障技术。而且谷歌Waymo等企业相继宣布将在激光雷达硬件上提供新的解决方案,大幅度缩减激光雷达成本。这个领域接下来很可能产生新的大硬件服务商,并且快速投入自动驾驶车辆的配置中,迎接无人驾驶的到来。
二、多元传感器。传感和测绘系统是解决无人驾驶安全隐患问题的核心,尤其是在复杂环境中的避险。无人驾驶传感器有多种解决方案,而最可能最后占领市场的是集合声波、红外线、热能的多元传感器。
三、视觉摄像头。摄像头是无人驾驶车辆的眼睛,也是无人驾驶车辆空间判断感的依据。但是链接处理器的视觉处理系统和应用硬件一直都没有特别成熟的产品。这个领域有很多新技术,也可以加入人工智能的辅助。应该会是接下来无人驾驶的重头戏。
四、超精准地图体系。与其让无人驾驶智能计算路线,更好的解决办法当然是让所有车辆根据地图自行移动,从而实现运力和交通安全的最大化,这就需要精度到分米级别的实时地图。国内外的地图企业与无人驾驶结合最大的可能点也在这里。
五、人机交互系统。前面说过,无人驾驶的人机交互系统将是全新的。那么具体的应用方式和标准化会成为急需的重点技术。目前这个领域新技术还很少,但准入门槛并不高,适合创业者深入。
六、车辆间交互系统。基于车联网系统,让车辆间相互感知并完成避让,是无人驾驶领域物联网技术的直接反应。完整的车辆交互应该能够做到车与人,车与车,车与路,车与网的综合交互,这个方向是技术的核心突破。
通过这几个急需的技术突破点,不难看出无人驾驶目前对硬件、软件、系统的需求都很强烈。这些技术的接连爆发和受到资本关注,是接下来无人驾驶市场的常态。相比较美国和以色列团队的热爱小技术,小硬件,国内玩家好像过于执迷整车制造和人工智能了。到头来很有可能又一次造成核心技术掌握在别人手里,甚至期待中的大风口过于遥远而迟迟不能到来。
大未来源于一步步的小突破。至少目前,还是不要把无人驾驶和人工智能想的那么亲密比较好。

(声明:本文仅代表作者观点,不代表新浪网立场。)


