
北京小哥召唤出机器飞龙,拿下ICRA最佳无人机论文
 这是一个悬浮在空中的飞龙。
这是一个悬浮在空中的飞龙。欢迎关注“创事记”的微信订阅号:sinachuangshiji
文/问耕
来源:量子位(ID:QbitAI)
机器飞龙。
能变形的机器飞龙。
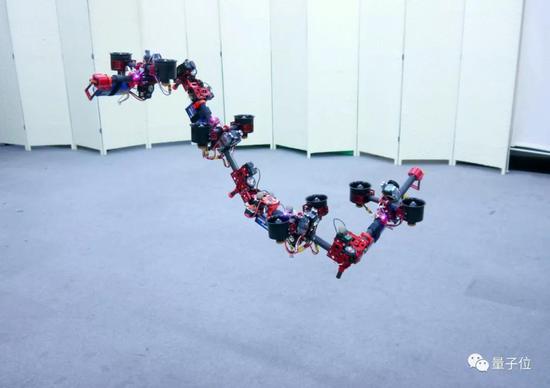
就像神话故事中的飞龙一样,这个变形机器飞龙,没有翅膀,但也能在空中穿行变化。
比如,像这样在空中昂首挺立。
比如像这样,在空中俯身盘踞。

是不是超厉害 ?没错,这个变形机器飞龙的相关研究,获得了机器人领域顶级会议ICRA 2018的最佳无人机论文大奖。
这样的一个机器飞龙,有什么用?
前景巨大。对于机器人来说,想要帮助人类完成工作,通常体型都不能太小,但如果体型太大,又会面临行动不灵活的问题。
这个机器飞龙,更好的解决了灵活性的问题。与地面机器人相比,能飞;与微型机器人相比,更强。
举个例子。
比如想穿过一个洞口。盘踞状态的飞龙,直径0.8米,而洞口的宽度0.6米。怎么办?
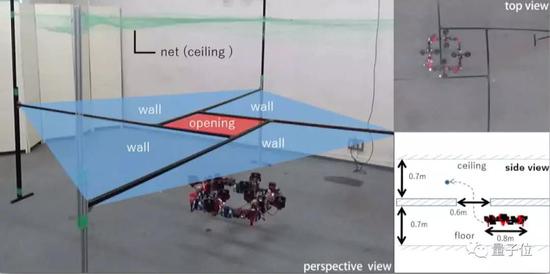 简单空中变形,然后像一条龙一样,穿行而过。
简单空中变形,然后像一条龙一样,穿行而过。就像下面三张动图所展示的那样。



飞龙解密
这个机器飞龙,出自东京大学JSK实验室。
正式的名字叫:DRAGON。
这个名字其实是一个缩写,全称:Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON。
即:具有多自由度空中变形能力的双旋翼嵌入式多连接机器人。
这个飞龙是一种模块化的飞行机器人,每个模块上都有一对涵道风扇推进器,可以驱动模块在任意方向上移动。
所有的模块通过电动铰接连接,这个飞龙的神经中枢是一块Intel Euclid,动力来自电池组,能够提供三分钟的飞行时间。
板载的IMU(惯性测量单元)和Intel Euclid组成飞行控制单元,每个模块上都有一个分布式的控制板(标记为neuron神经元),电子速度控制器(ESC)控制涵道风扇。
目前最多可以组成12个模块相互连接的大飞龙。
当这个机器飞龙盘踞起来,首尾连接,可以形成一个“两指夹持器”,也就是用首尾两端拾起物体,就像两根指头那样。
JSK实验室成员Fan Shi把这个飞龙描述为:“硬件设计的突破,它以美丽的方式将涵道风扇驱动的操纵臂连接起来,组成空中机器人。”
背后作者
上面提到的Fan Shi是这个飞龙机器人的研究者之一。
实际上,在ICRA 2018上获得最佳的那篇论文,作者团队包括:Moju Zhao、Tomoki Anzai、Fan Shi、Xiangyu Chen、Kei Okada、Masayuki Inaba。
其中第一作者,是Moju Zhao(赵漠居)。
赵漠居2008年毕业于北京师范大学附属中学,随后前往日本东京大学学习,并在2018年获得博士学位。

其实,这两年赵漠居一直在研究飞行机器人。
去年他的研究成果,也是一个可变形的飞行机器人,只不过去年的方案,只能在二维空间变形,不像今年这个更加灵活。
当然,也别小看这个机器人,它也是很有实力的,也能搬动物体飞起来~

据介绍,东京大学JSK机器人研究室创建于1977年,40年来影响了日本与世界几代机器人学者。
比方,这个实验室前几年推出了非常出名的人形机器人HRP-2等。源自这个实验室的机器人公司SCHAFT,在2013年的美国DARPA机器人挑战赛中获得了冠军,后被Google收购,然后又被软银买走。


(声明:本文仅代表作者观点,不代表新浪网立场。)
文章关键词: 网络文化
作者简介

量子位
作者文章

推荐阅读
- 北京小哥召唤出机器飞龙,拿下ICRA最佳无人机论文
-

- 机器飞龙。能变形的机器飞龙。就像神话故事中的飞龙一样,这个变形机器飞龙,没有翅膀,但也能在空中穿行变化。详细>>
- 华为高校合作计划或遭审查 美国大学联盟发邮件提醒
-

- 周二,美国两党26名立法者致信美教育部长,希望教育部能够调查华为与美国高等院校合作的“华为创新研究计划”和其他计划,理由是与华为的伙伴关系可能对美国国家安全构成重大威胁。另外,美国大学联盟(AAU)已经向全部联盟会员发邮件,提醒美国大学注意此事。详细>>
- 腾讯之必攻
-

- 腾讯一直说有两块东西要自己做,社交和内容。详细>>
- 智能音箱大战618哑火!说好的火拼呢?
-

- 今年618购物节,智能音箱“哑火”了。详细>>